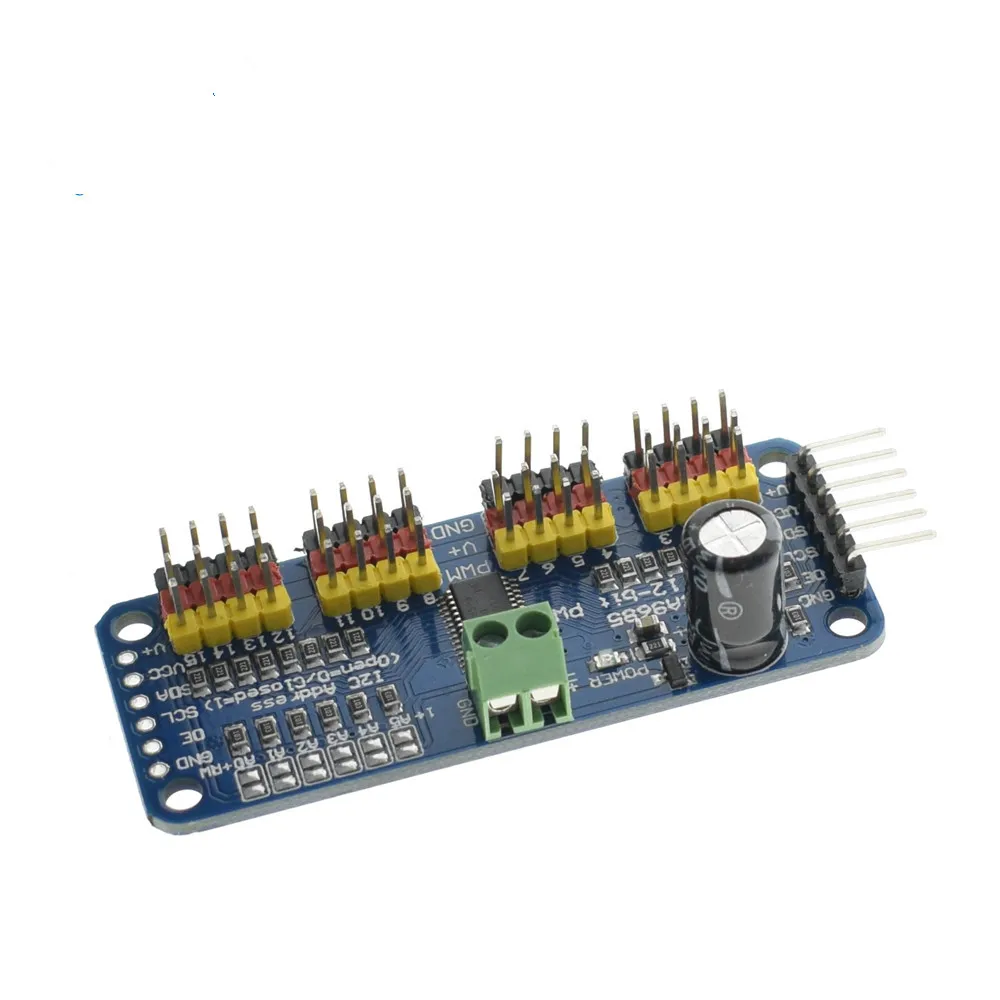
16-канал 12-бит ШИМ/сервопривод драйвер-I2C интерфейс-PCA9685 для Arduino для Pi DIY servo Щит Модуль
Посылка включает:
1 шт. 16-канал 12-бит ШИМ/сервопривод драйвер
![]()
![]() Описание:
Хотите сделать ШЕСТНАДЦАТЕРИЧНУЮ ходунку? Может быть, ты делаешь кусок искусства с тоннами движущихся частей, или вам нужно вести тонну светодиодов с точной функцией PWM. Ваш микроконтроллер имеет ограниченное число выходов PWM, и вы находите себя в бегах! Не с Adafruit 16-канал 12-бит ШИМ/сервопривод драйвер-I2C интерфейс. С этим pwm и servo driver breakout, вы можете управлять 16 бесплатными функциями PWM с двумя булавками! Нужно выполнить более 16 ШИМ выходов? Не проблема. Цепь вместе до 62 из этих красавиц для до выдающегося 992 ШИМ выхода.
Особенности:
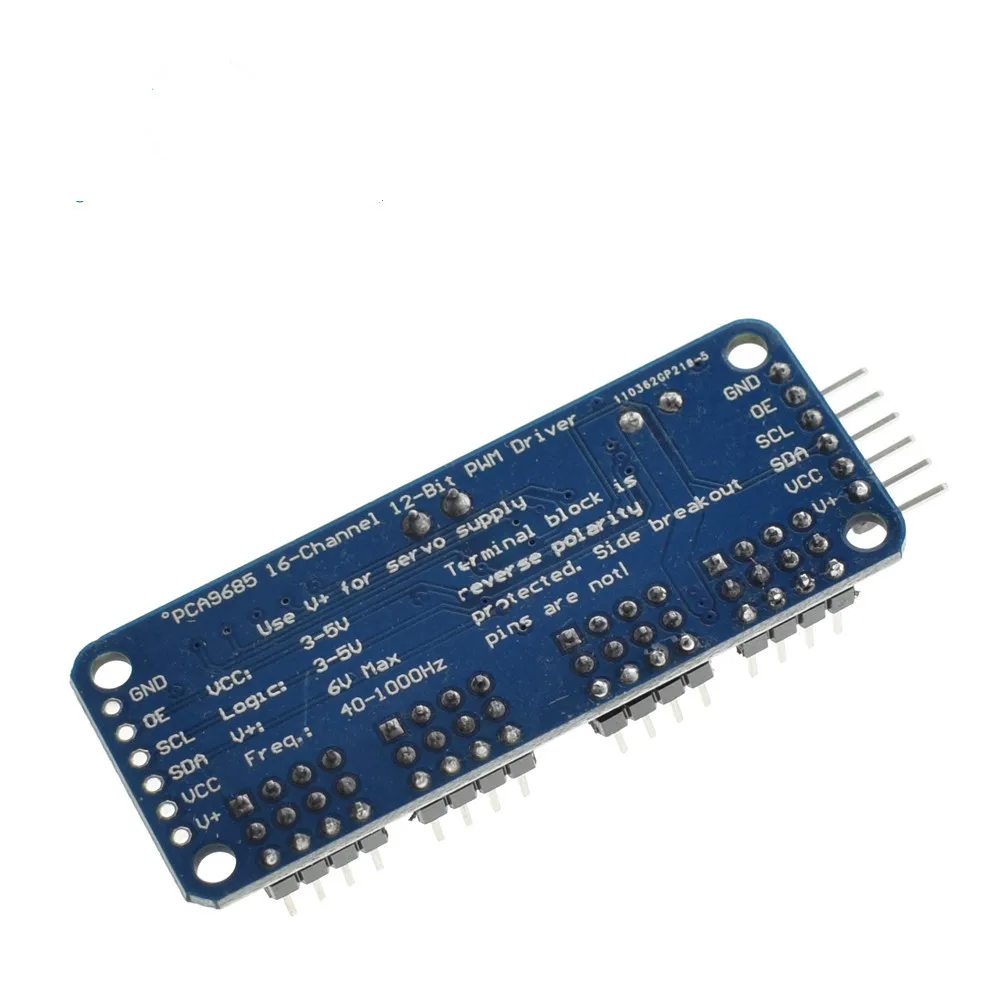
Размеры (без заголовков или клемм) 2,5 "х 1" x 0,1 "(62,5 мм x 25,4 мм x 3 мм)
Вес (без заголовков или клемм): 5,5 грамм
Вес (с 3x4 заголовками и клеммным блоком): 9 грамм
Эта плата/Чип использует I2C 7-бит адреса между 0x60-0x80, selectable с перемычками
Клеммный блок для входного сигнала (или можно использовать 0,1 "breakouts на стороне)
Защита обратной полярности на входе терминала
Зеленая мощность-хороший светодиодный
3 pin-Коннекторы в группах 4 так можно подключить в 16 servos сразу (сервозатычки есть чуть более 0,1 "так вы можете только стека 4 рядом друг с другом на 0,1" Заголовок
"Цепная возможность" дизайн
Место, чтобы разместить большой конденсатор на линии V + (в случае, если вам это нужно)
220 Ом серия резисторов на всех выходных линий для защиты их, и сделать водительские светодиоды тривиальный
Припой Джемперы для 6 адресов выберите булавки
I2c-контролируемый шим драйвер со встроенным в часы. В отличие от семейства TLC5940, вы не должны постоянно отправлять его сигнал, связывающий ваш микроконтроллер, его полностью свободно работает!
Оно соответствует 5 В, что означает, что вы можете контролировать его от 3,3 В микроконтроллер и все еще безопасно водить до 6 В выходов (Это хорошо, когда вы хотите контролировать белые или синие светодиоды с 3,4 + вперед напряжения)
6 Адрес Выберите булавки, так что вы можете провод до 62 из них на одиночном автобусе i2c, В общей сложности 992 выходов-это много сервоц или светодиодов
Регулируемая частота PWM до около 1,6 кГц
12-разрядное разрешение для каждого вывода-для сервоос, это означает, что разрешение 4us при скорости обновления 60 Гц
Настраиваемый толкающий или открытый сливный выход
Выход включить pin, чтобы быстро отключить все выходные данные
Инструкция по применению:
Описание:
Хотите сделать ШЕСТНАДЦАТЕРИЧНУЮ ходунку? Может быть, ты делаешь кусок искусства с тоннами движущихся частей, или вам нужно вести тонну светодиодов с точной функцией PWM. Ваш микроконтроллер имеет ограниченное число выходов PWM, и вы находите себя в бегах! Не с Adafruit 16-канал 12-бит ШИМ/сервопривод драйвер-I2C интерфейс. С этим pwm и servo driver breakout, вы можете управлять 16 бесплатными функциями PWM с двумя булавками! Нужно выполнить более 16 ШИМ выходов? Не проблема. Цепь вместе до 62 из этих красавиц для до выдающегося 992 ШИМ выхода.
Особенности:
Размеры (без заголовков или клемм) 2,5 "х 1" x 0,1 "(62,5 мм x 25,4 мм x 3 мм)
Вес (без заголовков или клемм): 5,5 грамм
Вес (с 3x4 заголовками и клеммным блоком): 9 грамм
Эта плата/Чип использует I2C 7-бит адреса между 0x60-0x80, selectable с перемычками
Клеммный блок для входного сигнала (или можно использовать 0,1 "breakouts на стороне)
Защита обратной полярности на входе терминала
Зеленая мощность-хороший светодиодный
3 pin-Коннекторы в группах 4 так можно подключить в 16 servos сразу (сервозатычки есть чуть более 0,1 "так вы можете только стека 4 рядом друг с другом на 0,1" Заголовок
"Цепная возможность" дизайн
Место, чтобы разместить большой конденсатор на линии V + (в случае, если вам это нужно)
220 Ом серия резисторов на всех выходных линий для защиты их, и сделать водительские светодиоды тривиальный
Припой Джемперы для 6 адресов выберите булавки
I2c-контролируемый шим драйвер со встроенным в часы. В отличие от семейства TLC5940, вы не должны постоянно отправлять его сигнал, связывающий ваш микроконтроллер, его полностью свободно работает!
Оно соответствует 5 В, что означает, что вы можете контролировать его от 3,3 В микроконтроллер и все еще безопасно водить до 6 В выходов (Это хорошо, когда вы хотите контролировать белые или синие светодиоды с 3,4 + вперед напряжения)
6 Адрес Выберите булавки, так что вы можете провод до 62 из них на одиночном автобусе i2c, В общей сложности 992 выходов-это много сервоц или светодиодов
Регулируемая частота PWM до около 1,6 кГц
12-разрядное разрешение для каждого вывода-для сервоос, это означает, что разрешение 4us при скорости обновления 60 Гц
Настраиваемый толкающий или открытый сливный выход
Выход включить pin, чтобы быстро отключить все выходные данные
Инструкция по применению:
![]()
![]() (1) дисковод, подключенный к Arduino:
PWM плата драйвера использует метод I2C, так что только четыре линии могут быть подключены к устройству Arduino:
"Классический" режим Arduino pin:
+ 5 В-> VCC
Земля-> Земля
Аналог 4-> СДА
Аналог 5-> SCL
Старый Мега pin-способ:
+ 5 В-> VCC
Земля-> Земля
Цифровой 20-> СДА
Цифровой 21-> SCL
R3 и позднее метод Arduino pin (Uno, мега &
Леонардо):
(Эти платы посвящены SDA и скин SCL)
+ 5 В-> VCC
Земля-> Земля
SDA-> SDA
SCL-> SCL
(1) дисковод, подключенный к Arduino:
PWM плата драйвера использует метод I2C, так что только четыре линии могут быть подключены к устройству Arduino:
"Классический" режим Arduino pin:
+ 5 В-> VCC
Земля-> Земля
Аналог 4-> СДА
Аналог 5-> SCL
Старый Мега pin-способ:
+ 5 В-> VCC
Земля-> Земля
Цифровой 20-> СДА
Цифровой 21-> SCL
R3 и позднее метод Arduino pin (Uno, мега &
Леонардо):
(Эти платы посвящены SDA и скин SCL)
+ 5 В-> VCC
Земля-> Земля
SDA-> SDA
SCL-> SCL
![]() VCC pin только для чип питания, если вы хотите подключить сервопривод или светодиодный огни, используйте блок питания V + pin, V + pin поддерживает 3,3 ~ 6 В блок питания (чип безопасное напряжение 5 В). Рекомендуется подключить внешний блок питания через терминал питания.
2) Блок питания:
Большинство сервопривода напряжение составляет 5 ~ 6 В, особенно в ряде рулевого редуктора в то же время, с потребностью в высокомощный блок питания. Если вы непосредственно используете Arduino 5 В pin для питания сервопривода непосредственно, есть некоторые непредсказуемые проблемы, поэтому мы рекомендуем вам иметь подходящий внешний блок питания для дисковода.
VCC pin только для чип питания, если вы хотите подключить сервопривод или светодиодный огни, используйте блок питания V + pin, V + pin поддерживает 3,3 ~ 6 В блок питания (чип безопасное напряжение 5 В). Рекомендуется подключить внешний блок питания через терминал питания.
2) Блок питания:
Большинство сервопривода напряжение составляет 5 ~ 6 В, особенно в ряде рулевого редуктора в то же время, с потребностью в высокомощный блок питания. Если вы непосредственно используете Arduino 5 В pin для питания сервопривода непосредственно, есть некоторые непредсказуемые проблемы, поэтому мы рекомендуем вам иметь подходящий внешний блок питания для дисковода.
![]() (3) Подключите Сервопривод:
Большинство порций соединяются с помощью стандартных 3-проводных женских затычек, до тех пор, пока соответствующая булавка на доски водителя на нем. (Наземный провод вообще черный или коричневый, сигнальная линия вообще желтая или белая)
(3) Подключите Сервопривод:
Большинство порций соединяются с помощью стандартных 3-проводных женских затычек, до тех пор, пока соответствующая булавка на доски водителя на нем. (Наземный провод вообще черный или коричневый, сигнальная линия вообще желтая или белая)
![]() 4) для установленного Советом водителя адреса:
Каждый привод платы каскада должен иметь уникальный адрес доступа. Первоначальный I2C Адрес каждой платы драйвера составляет 0 × 40, можно изменить верхний правый угол перемычки I2C-адрес. Подключите джемпер с припой, чтобы указать двоичный номер "1".
4) для установленного Советом водителя адреса:
Каждый привод платы каскада должен иметь уникальный адрес доступа. Первоначальный I2C Адрес каждой платы драйвера составляет 0 × 40, можно изменить верхний правый угол перемычки I2C-адрес. Подключите джемпер с припой, чтобы указать двоичный номер "1".
![]() Плата 0: адрес = 0x40
Смещение = Двоичная 00000 (по умолчанию)
Плата 1: адрес = 0x41 смещение = Двоичная 00001 (как показано выше, подключен к A0)
Плата 2: адрес = 0x42 офсет = двоичный 00010 (подключение к A1)
Плата 3: адрес = 0x43 офсет = двоичный 00011 (connect A0 и A1)
Плата 4: адрес = 0x44 смещение = двоичный 00100 (подключение к A2)
А так на...
Пример кода:
# Включают
# Включают
<Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm1 =
Adafruit_pwmservodriver (0 × 40);
Adafruit_PWMServoDriver pwm2 =
Adafruit_pwmservodriver (0x41);
Установка пустоты () {
Serial. beging (9600);
Последовательный. printn ("16 канал
ШИМ тест! ");
Pwm1.begin ();
Pwm1.setpwmfreq (1600);/л/с
Это-максимальная частота PWM
Pwm2.begin ();
Pwm2.setpwmfreq (1600);/л/с
Это-максимальная частота PWM
}
Плата 0: адрес = 0x40
Смещение = Двоичная 00000 (по умолчанию)
Плата 1: адрес = 0x41 смещение = Двоичная 00001 (как показано выше, подключен к A0)
Плата 2: адрес = 0x42 офсет = двоичный 00010 (подключение к A1)
Плата 3: адрес = 0x43 офсет = двоичный 00011 (connect A0 и A1)
Плата 4: адрес = 0x44 смещение = двоичный 00100 (подключение к A2)
А так на...
Пример кода:
# Включают
# Включают
<Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm1 =
Adafruit_pwmservodriver (0 × 40);
Adafruit_PWMServoDriver pwm2 =
Adafruit_pwmservodriver (0x41);
Установка пустоты () {
Serial. beging (9600);
Последовательный. printn ("16 канал
ШИМ тест! ");
Pwm1.begin ();
Pwm1.setpwmfreq (1600);/л/с
Это-максимальная частота PWM
Pwm2.begin ();
Pwm2.setpwmfreq (1600);/л/с
Это-максимальная частота PWM
}
window.adminAccountId=120371538;

























В детстве я обожал смотреть мультик по этой вселенной. Каждая битва прям наполняла адреналином и постоянно хотелось почувствовать себя на... Читать отзыв полностью...