
CSD5-02BX1 сервопривод Б/у 85% внешний вид нового Бесплатно Доставка - купить по
12600


Сохраните в закладки:



*История изменения цены! Указанная стоимость возможно, уже изменилось. Проверить текущую цену - >
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-23-2026 | 179.43 руб. | 188.89 руб. | 183.5 руб. |
| Feb-23-2026 | 177.93 руб. | 186.36 руб. | 181.5 руб. |
| Jan-23-2026 | 149.96 руб. | 156.84 руб. | 152.5 руб. |
| Dec-23-2025 | 174.29 руб. | 183.29 руб. | 178.5 руб. |
| Nov-23-2025 | 152.75 руб. | 160.13 руб. | 156 руб. |
| Oct-23-2025 | 171.73 руб. | 180.73 руб. | 175.5 руб. |
| Sep-23-2025 | 170.64 руб. | 179.51 руб. | 174.5 руб. |
| Aug-23-2025 | 168.3 руб. | 176.81 руб. | 172 руб. |
| Jul-23-2025 | 167.82 руб. | 175.54 руб. | 171 руб. |
Новые товары
Характеристики
Описание товара
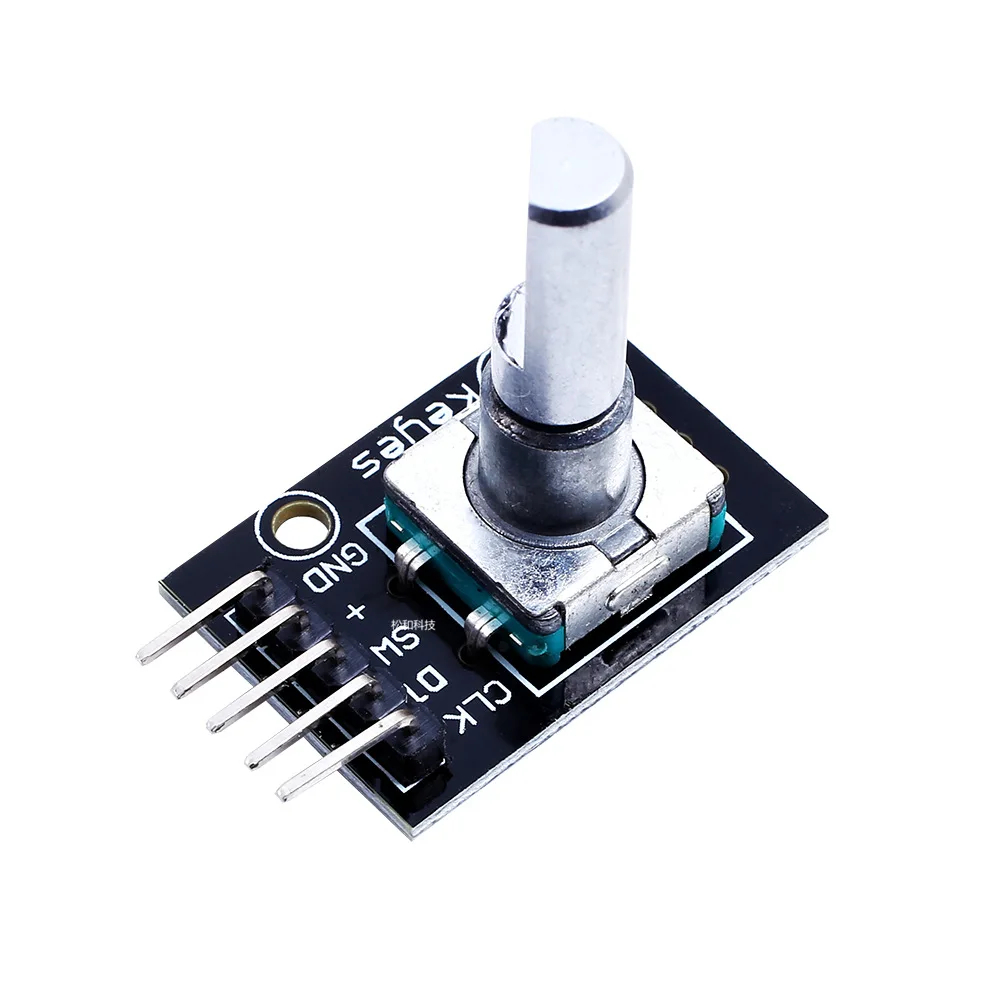
Модуль энкодера-nbsp;
Рабочее напряжение: 5 В
Количество импульсов в круге: 20
Вращающийся датчик можно поворачивать, чтобы подсчитать количество импульсов, выходящих во время вращения в положительных и противоположных направлениях. Количество оборотов не соответствует потенциометру. Это количество оборотов неограничено. С ключами на вращающийся датчик его можно сбросить в исходное состояние., то есть от0Начинают рассчитывать.
Принцип работы:
Инкрементный энкодер-это поворотный датчик, который преобразует вращательное смещение в ряд цифровых импульсных сигналов. Эти импульсы используются для регулирования углового смещения.EltraПринцип фотоэлектрического сканирования используется для преобразования углового смещения в энкодере. Система чтения основана на вращении радиального циферблата (кодовый диск), состоящего из чередующихся световых передающих окон и световых плотных окон при вертикальном освещении инфракрасным источником света, который проецирует изображение кодовый диск на поверхность приемника. Приемник покрывает слой Дифракционный решетчатый, который имеет ту же ширину окна, что и кодовый диск. Работа приемника заключается в том, чтобы почувствовать изменение поворота оптического диска, а затем преобразовать свет в соответствующее электрическое изменение. Затем сигнал низкого уровня поднимается на более высокий уровень и генерируется квадратный импульс без каких-либо помех, который должен быть обработан с помощью электронной цепи. Система чтения обычно принимает дифференциальный режим, т. е., два сигнала являются тем же, но разность фаз180Различные сигналы сравниваются для улучшения качества и стабильности выходного сигнала.
Энкодера:

Инкрементный энкодер дает двухфазную квадратную волну, их фазовую разницу90°, Обычно называемыйAКанал иBПроход. Один из каналов дает информацию, связанную со скоростью, в то время как два канала сигналов сравниваются последовательно, чтобы получить информацию о направлении вращения. Есть также специальный сигнал под названиемZИли 0 каналов, канал дает абсолютный 0-битный кодер, и этот сигнал является квадратной волной сAЦентральная линия канала квадратной волны совпадает.

Точность инкрементного кодировщика зависит как от механических, так и от электрических факторов, таких как погрешность решетки, эксцентриситет диска, эксцентриситет подшипника, погрешность, введенная электронным считывающее устройство и неточность оптической части. Единица измерения для определения точности энкодера-это степень электричества, точность энкодера определяет счет импульса, генерируемый энкодером. Далее используется для указания поворота механического вала с большим количеством электрических градусов, а вращение вала должно быть полным периодом. Чтобы узнать, сколько механический угол эквивалентен 360 градусам на электрике, можно использовать следующую формулу для расчета: electrical 360 = mechanical 360 °/n° pulse/Turn

Рисунок: сигнал, когда a, b является коммутативным
Ошибка разделения кодировщика представлена максимальным смещением двух непрерывных импульсных волн в единицах электрического угла. Ошибка существует в любом кодировщике. Это вызвано вышеуказанными факторами. Максимальная погрешность энкодера Eltra составляет ± 25 электрического угла (при любом указанном состоянии), что эквивалентно смещению номинального значения ± 7%, максимальное отклонение двух каналов с разницей в фазе 90 ° (электрически) составляет ± 35.
Инкрементный энкодер для сигнала UVW
В дополнение к традиционным кодерам, упомянутым выше, некоторые инкрементные кодерами интегрированы с другими электрическими выходными сигналами. Примерами являются инкрементные кодеры, интегрированные с сигналами UVW, которые обычно применяются отзывы сервомоторов переменного тока. Эти полюсные сигналы обычно появляются в сервоприводах переменного тока. Сигналы UVW, как правило, разработаны путем имитации функций магнитные компоненты. В Eltra кодирования. В устройстве эти сигналы UVW генерируются оптическим методом и появляются в виде трех квадратных волн, которые смещают друг друга на 120 градусов. Для того, чтобы облегчить запуск двигателя-up, стартер для управления двигателем нуждается в этих правильных сигналах. Эти полюсные импульсы UVW могут многократно повторяться при вращении механической оси, поскольку они напрямую зависят от количества полюсов, подключенных к двигателю, и используются для сигналов UVW 4, 6 или более полюсных двигателей.
***************************************************************************
Arduino Тесты товара:
Int redPin = 2;
Инт йеллоупин = 3;
Int greenPin = 4;
Int aPin = 6;
Int bPin = 7;
Int buttonPin = 5;
Инт-состояние = 0;
Int longPeriod = 5000;/время в зеленом или красном цвете
Int shortPeriod = 700;/период времени при изменении
Int targetCount = короткий период;
Int count = 0;
Недействительными установки ()
{
PinMode (aPin, вход);
PinMode (bPin, вход);
PinMode (buttonPin, вход);
PinMode (redPin, выход);
PinMode (yellowPin, выход);
PinMode (greenPin, выход);
}
Недействительными петля ()
{
Количество + +;
If (digitalRead (buttonPin)
{
Комплекты (высокие, высокие, высокие);
}
Еще
{
Int change = getEncoderTurn ();
Int newPeriod = длинный период + (изменение * 1000);
If (новый период> = 1000 & новый период <= 10000)
{
LongPeriod = newPeriod;
}
If (count> targetCount)
{
Выполнении функция setState ();
Count = 0;
}
}
Задержка (1);
}
Int getEncoderTurn ()
{
/Возврат-1, 0 или + 1
Статический Инт oldA = низкий;
Статический Инт oldB = низкий;
Результат int = 0;
Int newA = digitalRead (aPin);
Int newB = digitalRead (bPin);
If (newA! = oldA | newB! = oldB)
{
/Что-то изменилось
Если (oldA = LOW & newA = HIGH)
{
Результат =-(oldB * 2-1);
}
}
OldA = newA;
OldB = newB;
Возвращение результат;
}
Int выполнении функция setState ()
{
Если (Состояние = 0)
{
Комплект (высокий, низкий, низкий);
TargetCount = longPeriod;
Состояние = 1;
}
Иначе если (Состояние = 1)
{
Комплекты (высокие, высокие, низкие);
TargetCount = shortPeriod;
Состояние = 2;
}
Иначе если (Состояние = 2)
{
Комплекты (низкие, низкие, высокие);
TargetCount = longPeriod;
Состояние = 3;
}
Иначе если (Состояние = 3)
{
Комплекты (низкие, высокие, низкие);
TargetCount = shortPeriod;
Состояние = 0;
}
}
Пустые комплекты (int красный, int желтый, int зеленый)
{
DigitalWrite (красный, красный);
Цифровой (желтый, желтый);
DigitalWrite (greenPin, зеленый);
}



Шикарное платье, давно искала именно такое. Выполнено в винтажном стиле, и от него прямо веет духом тех лет. В нем... Читать отзыв полностью...

Заказала эту футболку, под свои джинсы. Товар пришел а отличном состоянии. Футболка идеально подошла по размеру. После стирки не села,... Читать отзыв полностью...

В детстве я обожал смотреть мультик по этой вселенной. Каждая битва прям наполняла адреналином и постоянно хотелось почувствовать себя на... Читать отзыв полностью...

Давно подыскивала сандалии с такими завязками, чтобы они заплетались выше стопы. В этих на первый взгляд, понравилось все - неброский,... Читать отзыв полностью...

Пару слов хочу сказать о этих монетах, потому как выписала их в подарок племяннику, он уже много лет собирает их.... Читать отзыв полностью...
Нарядилась на свадьбу в это платье, и чувствовала себя без преувеличения, королевой. Вблизи оно просто супер - тончайшее кружево, белоснежная... Читать отзыв полностью...








Заказывала толстовку для сына. Если честно качество прям удивило, думала придет хуже. Товаром довольна, толстовка теплая стильная, сыну понравилась. С... Читать отзыв полностью...